O software de mapeamento de corrosão UTmap é um software de análise que cria um Tiled Scan (T-Scan) usando vários C-Scans individuais e gera imagens combinadas dos resultados da inspeção. Cada C-Scan pode ser posicionado ou costurado para formar um T-Scan e representar a geometria da peça. Uma vez montado, o T-Scan representa uma imagem significativa para análise e relatórios.
O UTmap também oferece recursos que incluem a capacidade de importar desenhos, contornos e informações como imagens para sobrepor no T-Scan e fornece automaticamente dados e dimensões precisas de falhas. Além disso, permite realizar varreduras individuais em peças planas em eixo X, e posteriormente agrupá-las, montando um mapa completo da peça em eixo X e Y, possibilitando também a medição individual de ponto a ponto para verificação da espessura e análise da espessura remanescente da peça.
O T-scan fornece uma tela C-scan interativa onde os usuários têm a flexibilidade de manipular cursores, dados e anotações conforme desejado. Com mapeamento de pixels de alta resolução dos modos de amplitude e profundidade, os defeitos podem ser identificados e anotados com precisão com definição completa da varredura.
Desde o seu lançamento em 2018, vários cenários de análise foram aprimorados para aumentar ainda mais a precisão dos dados do T-scan.
Para cada cenário abaixo, identificamos um recurso-chave no UTmap que mostra os benefícios que ele traz para o revisor. Também adicionaremos quaisquer comentários importantes que possam ajudar no seu processo de análise.
Cenário 1 – Gere medições automaticamente a partir de defeitos detectados.
Usando as caixas de anotação do UTMap, quando ativada, a caixa de anotação ajusta dinamicamente seus contornos , destacando áreas defeituosas em uma cor altamente contrastante. Indicará a presença de um defeito que exceda os limites predefinidos nos modos de espessura ou amplitude. Os usuários podem selecionar critérios de amplitude, critérios de profundidade ou ambos simultaneamente.

Cenário 2 – C-Scans individuais podem ter configurações de ganho diferentes devido ao mau acoplamento ou às condições da superfície, isto pode produzir diferenças visíveis nas imagens T-Scan produzidas.
Usando o recurso de ajuste de ganho pós-aquisição, você pode equilibrar a configuração de ganho e as posições das portas em todos os C-Scans para produzir uma imagem T-Scan unificada. Isso permite consistência nas avaliações de defeitos em todas as varreduras.

Cenário 3 – Erros no alinhamento do C-Scan, na orientação da digitalização e nas posições iniciais podem causar uma imagem combinada geral incorreta.
O UTMap permite controle total da orientação e direção da varredura, permitindo que ajustes sejam feitos ao combinar a varredura final.
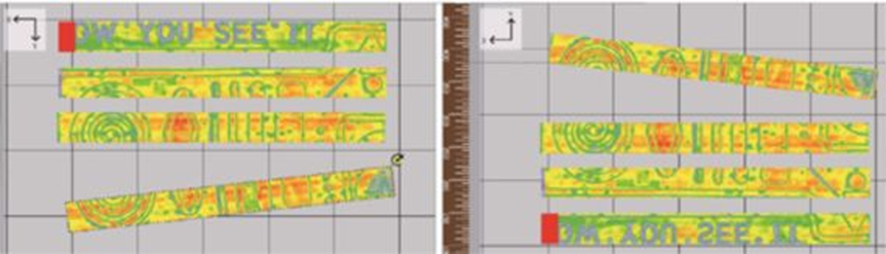
O recurso de corte de dados remove dados perdidos e excessos nas verificações, evitando que as anotações coletem dados de baixa qualidade.
Cenário 4 – Ao mapear a corrosão, a precisão da avaliação do dado é crítica.
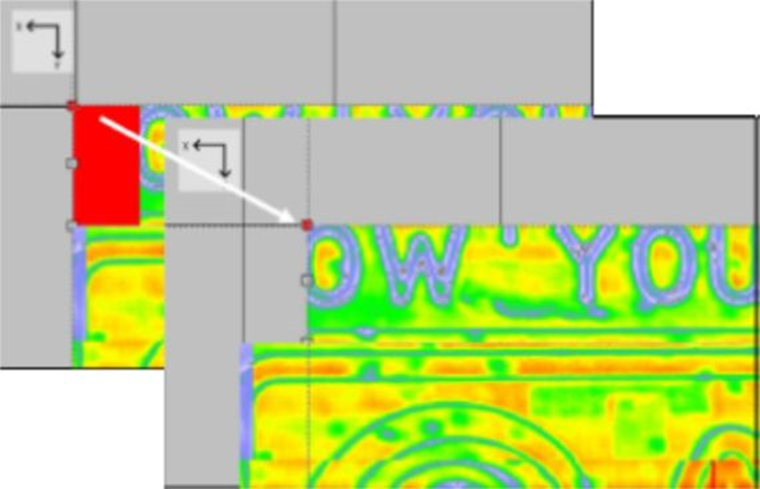
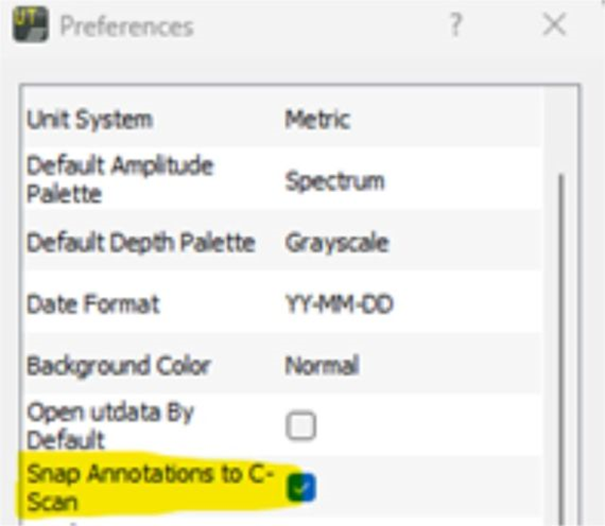
Quando a posição do cursor sobre uma área inspecionada é crítica para a avaliação de defeitos, você pode obter uma medição de avaliação perfeita. As próximas duas ferramentas eliminam erros humanos durante as interações de dados. Tanto os cursores de anotação quanto os C-scans podem ter posições predefinidas para posicionamento repetível em múltiplas inspeções.
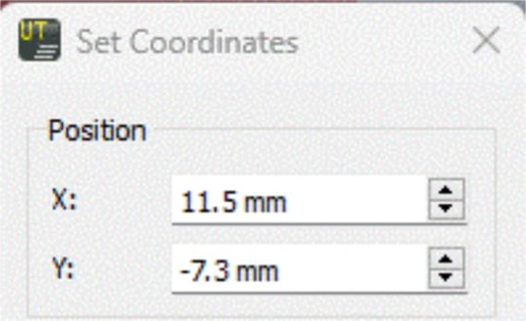
Os usuários podem preferir posicionar o cursor de anotação exatamente nas bordas do C-scan.
Veja no link a seguir o vídeo de demonstração do mapeamento de corrosão utilizando o software UTMap

O mapeamento C-scan é o melhor método de ensaio de ultrassom para inspecionar rapidamente grandes superfícies e como podemos observar a utilização de ferramentas desenvolvidas especificamente para aprimorar o método, como o software UTMap, contribui para a agilidade e confiabilidade da inspeção.